In algebra multilineare la notazione di Voigt, nota anche come notazione di Mandel-Voigt, notazione di Nye o notazione di Kelvin, è un modo di rappresentare i tensori simmetrici riducendone l'ordine. L'idea di base sta nel rappresentare il tensore unicamente con le sue componenti indipendenti.
Ad esempio, la matrice simmetrica  può essere rappresentata da un vettore
può essere rappresentata da un vettore  nel seguente modo:
nel seguente modo:

Regola mnemonica
Una semplice regola mnemonica per la scrittura di un tensore simmetrico secondo la notazione di Voigt, può essere la seguente:
Presa ad esempio una matrice 3×3, che è un tensore di ordine 2, si prenda la matrice triangolare superiore associata, le componenti del vettore corrispondente saranno nell'ordine:
- I termini lungo la diagonale
- I termini incontrati risalendo la terza colonna
- I termini sulla prima riga, partendo dal fondo, sino a ricongiungersi con la diagonale
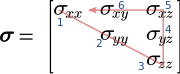

In alternativa si può prendere la matrice triangolare inferiore e chiudere il triangolo in senso opposto.

Applicazioni
Le applicazioni di questa notazione sono molteplici. Casi notevoli sono il metodo degli elementi finiti e la legge di Hooke generalizzata.
Prendendo ad esempio quest'ultima si ha:

dove  è il tensore degli sforzi,
è il tensore degli sforzi,  il tensore delle deformazioni, tensori di ordine 2 rappresentabili come matrici, e
il tensore delle deformazioni, tensori di ordine 2 rappresentabili come matrici, e  è una matrice 6×6 detta matrice di rigidezza costitutiva:
è una matrice 6×6 detta matrice di rigidezza costitutiva:

Riscrivendo la legge di Hooke riscritta con la notazione di Voigt si ha:

dove è il vettore delle tensioni, il vettore delle deformazioni e la matrice di rigidezza costitutiva:

Altri progetti
 Wikimedia Commons contiene immagini o altri file su Notazione di Voigt
Wikimedia Commons contiene immagini o altri file su Notazione di Voigt
 Portale Matematica
Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica

 Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica
Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica









