Matice
Tento článek je o matematice. Další významy jsou uvedeny na stránce Matice (rozcestník).





Matice je v matematice obdélníkové či čtvercové schéma čísel nebo nějakých matematických objektů – prvků matice (též elementů matice).
Nejsou-li uvedeny další podrobnosti, reprezentují matice lineární zobrazení a umožňují provádět výpočty v lineární algebře. Proto je studium matic podstatnou částí lineární algebry. Většinu vlastností a operací abstraktní lineární algebry lze vyjádřit pomocí matic. Například maticový součin odpovídá skládání lineárních zobrazení.
Část matematiky, která využívá matice, je označována jako maticový počet.
Ne všechny matice souvisí s lineární algebrou, například matice incidence a matice sousednosti v teorii grafů. Tento článek se zaměřuje na matice související s lineární algebrou, a pokud není uvedeno jinak, všechny matice představují lineární zobrazení nebo je za takové lze považovat.
Čtvercové matice, matice se stejným počtem řádků a sloupců, hrají podstatnou roli v teorii matic. Čtvercové matice dané dimenze tvoří nekomutativní okruh, což je jeden z nejběžnějších příkladů nekomutativního okruhu. Determinant čtvercové matice je číslo spojené s maticí, které je zásadní pro studium čtvercových matic; například čtvercová matice je regulární, právě když má nenulový determinant. Vlastní čísla čtvercové matice jsou kořeny charakteristického polynomu, který je definován pomocí determinantu.
V geometrii jsou matice používány pro popis a reprezentaci geometrických transformací (například rotací) a změn souřadnic . V numerické analýze je mnoho výpočetních problémů redukováno na maticový výpočet, což často vyžaduje výpočet na počítači s maticemi velkých rozměrů. Matice se používají ve většině oblastí matematiky a ve většině vědeckých oborů, a to buď přímo, nebo prostřednictvím jejich použití v geometrii a numerické analýze.
Matice se často využívají pro vyjádření obecné rotace vektorů, transformace vektorů od jedné báze k bázi jiné, k řešení soustav lineárních rovnic, či k vyjádření operátorů v kvantové mechanice. Schopnost matic vyjadřovat vztahy mezi vektory se využívá v materiálovém inženýrství při studiu anizotropních materiálů.
Definice
Matice je obdélníkové schéma čísel (nebo jiných matematických objektů), nazývané prvky matice. Nejčastěji je matice vybudována nad nějakým algebraickým tělesem . Reálné a případně komplexní matice jsou matice, jejichž položky jsou reálná nebo komplexní čísla. Ukázkou reálné matice je:


Čísla, symboly nebo výrazy v matici se nazývají její prvky. Vodorovné a svislé posloupnosti prvků matice se nazývají řádky a sloupce.
Rozměr
Rozměr matice je definován počtem řádků a sloupců, které obsahuje. Neexistuje žádné omezení počtu řádků a sloupců, které může matice (v obvyklém smyslu) mít, pokud se jedná o kladná celá čísla. Obsahuje-li matice řádků a sloupců, hovoříme pak o matici typu , zatímco a se nazývají její rozměry. Například matice výše je matice typu .


Matice typu je tvořena jedním řádkem a bývá nazývána řádkový vektor případně řádková matice. Matice s jedním sloupcem se nazývá (sloupcový) vektor, případně sloupcová matice.

Je-li , pak matici označujeme jako čtvercovou matici -tého řádu (stupně). Pro bývá matice označována jako obdélníková.


Jsou-li i konečná čísla, označujeme matici jako konečnou. Matice s nekonečným počtem řádků nebo sloupců (nebo obojí) se nazývá nekonečná matice. V některých kontextech je užitečné dodefinovat i matici bez řádků nebo sloupců, nazývanou prázdná matice.
Značení
Maticová notace se značně liší. Matice jsou běžně psány v oblých či hranatých závorkách, takže matici typu lze zapsat
Matice jsou v učebnicích a technické matematice zpravidla značeny velkými tučnými písmeny [1], apod. Ve vyšší matematice a odborné matematické literatuře se od zvýrazňování zpravidla upouští a matice se značí tence, např. nebo .




Jsou-li rozměry matice zřejmé, je možné použít jednoduchého zápisu
- .

Potřebujeme-li zdůraznit počet řádků a sloupců, lze také použít zápis
- nebo


Prvky matice jsou označeny indexy udávajícími řádek a sloupec, v nichž se prvek nalézá. Prvek v -tém řádku a -tém sloupci matice se obvykle značí , případně . Druhá notace se používá, zejména je-li matice popsána složitějším výrazem, např. pomocí maticových operací. Nyní -tý řádek matice obsahuje vodorovnou -tici prvků , kde a -tý sloupec matice obsahuje svislou -tici čísel , kde .








Např. leží v pátém řádku a třetím sloupci. Indexy se píší buďto oba dole jako , nebo první nahoře a druhý dole jako , což má význam, jakmile je potřeba rozlišovat kovariantní a kontravariantní indexy, zejména operujeme-li s maticemi jako s tenzory.


Tvoří-li indexy více než dva symboly, je třeba je oddělit čárkou, např. nebo .


Ukázka
Matice

je obdélníková matice typu . Prvek matice nebo je 7.



Pokud jsou všechny prvky matice nulové, tzn. pro všechna , označujeme matici jako nulovou.


Operace s maticemi
Součet, skalární násobek a transpozice
| Operace | Definice | Příklad |
|---|---|---|
| Součet | Součet dvou matic a typu je matice typu , přičemž sčítání probíhá po složkách: pro a . |
|
| Skalární násobek | -násobek matice , pro číslo (nazývané skalár) a matici , se spočítá vynásobením každého prvku matice číslem : | |
| Transpozice | Transpozicí matice typu získáme transponovanou matici typu , která vznikne záměnou řádků a sloupců:
|















Součin matic
Podrobnější informace naleznete v článku Součin matic.
Součin dvou matic je definován pouze pokud má levá matice stejný počet sloupců jako má pravá matice řádků. Pokud je matice typu a je matice typu , pak jejich součin je matice typu , jejíž prvky jsou standardním skalárním součinem příslušného řádku a příslušného sloupce


- kde a .


Například zvýrazněný prvek součinu se spočítá jako



Maticový součin je asociativní, neboli splňuje rovnost . Je také distributivní vůči součtu zleva i zprava, čili a , pokud mají matice takové rozměry, aby součiny byly definovány.



Součin může být definován, aniž by měl smysl součin , a o v případě, pokud a jsou matice typu a , kde . I když jsou oba součiny definovány, nemusí být stejné, neboli existují příklady matic, pro něž platí



Maticový součin není komutativní, na rozdíl od součinu (racionálních, reálných, nebo komplexních) čísel. Příklad dvou matic, jejichž součin nekomutuje:
- zatímco


Mimo obvyklý maticový součin existují ještě jiné operace s maticemi, které lze považovat za určitý druh součinu, jako například Hadamardův součin anebo Kroneckerův součin.
Další operace s maticemi
Rovnost
- O dvou maticích a prohlásíme, že jsou si rovny, pokud jsou stejného typu (stejný počet řádků i sloupců) a každý prvek matice je roven odpovídajícímu prvku matice . Rovnost zapíšeme


Rozdíl
- Rozdíl dvou matic a (stejného typu) je nová matice :

Prvky matice jsou pak určeny vztahem


Lineární kombinace
- Obecně lze pro matice , které jsou stejného typu, definovat lineární kombinaci matic

- ,
- kde prvky matice určuje výraz



Mocnina
- Opakovaným součinem čtvercové matice se samou sebou lze vytvářet mocniny matic . Tyto mocniny lze poté využít při zápisu polynomu

- , kde je jednotková matice stejného typu jako .


Řádkové operace
S maticemi lze provádět následující elementární řádkové operace:
- součet, neboli přičtení nějakého řádku k jinému,
- vynásobení řádku, resp. všech prvků v řádku, nenulovou konstantou.
Z těchto dvou operací lze odvodit i
- záměnu pořadí řádků,
- přičtení násobku řádku k jinému.
Zmíněné řádkové operace se používají v řadě situací včetně řešení soustav lineárních rovnic (neboť zachovávají množinu řešení) a výpočtu inverzní matice.
Podobným způsobem lze definovat i sloupcové operace.
Podmatice
Podmatice se z matice získá odstraněním libovolně mnoha řádků anebo sloupců. Například odebrání třetího řádku a druhého sloupce z následující matice řádu dává podmatici řádu :



Determinanty určitých podmatic se nazývají minory a kofaktory.
Hlavní podmatice je čtvercová podmatice získaná odstraněním určitých řádků a sloupců. Definice se liší od autora k autorovi. Podle některých autorů je hlavní podmatice taková podmatice, ve které se shodují indexy ponechaných řádků s indexy ponechaných sloupců. Jiní autoři považují za hlavní podmatice jen takové, ve kterých je ponecháno jen několik prvních řádků a odpovídajících sloupců. Uvedený typ podmatice bývá také nazýván vedoucí hlavní podmatice.
Lineární zobrazení

Související informace naleznete také v článku Lineární zobrazení.
Podstatné vlastnosti matic a maticového součinu vynikají v kontextu lineárních zobrazení, nazývaných též lineární transformace. Reálná matice typu určuje lineární zobrazení → tím, že vektor zobrazí maticovým součinem na vektor Na druhou stranu, každé lineární zobrazení je určeno jednoznačně maticí typu . Konkrétně prvek je -tou souřadnicí vektoru , kde je jednotkový vektor s 1 na -té pozici a nulami jinde. O matici se říká, že reprezentuje lineární zobrazení , a se nazývá transformační matice zobrazení .








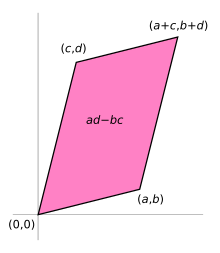
Například na čtvercovou matici

lze pohlížet jako na zobrazení, které transformuje jednotkový čtverec na rovnoběžník s vrcholy v , , a . Rovnoběžník zobrazený vpravo se získá postupným součinem matice se sloupcovými vektory , , a . (Tyto vektory jsou vrcholy jednotkového čtverce.)








Následující tabulka předvádí několik matic s příslušnými lineárními zobrazeními v . Obrazem modrého originálu jsou zelená mřížka a zelené obrazce. Počátek je vyznačen černou tečkou.

| Vodorovné zkosení s faktorem = 1,25 | Osová souměrnost podél svislé osy | Transformace zachovávající plochu s faktorem r = 3/2 | Škálování faktorem 3/2 | Otáčení o π /6 = 30° |
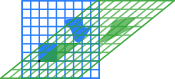 | 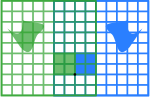 |  | 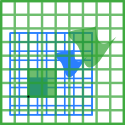 | 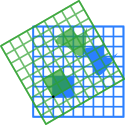 |





Vzhledem k vzájemně jednoznačnému vztahu mezi maticemi a lineárními zobrazeními odpovídá maticový součin skládání zobrazení: Jestliže matice typu představuje lineární zobrazení , pak složení je reprezentováno , protože





Poslední rovnost vyplývá z asociativity maticového součinu.
Vlastnosti a základní pojmy

Diagonála matice
Související informace naleznete také v článku Diagonála matice.
Prvky čtvercové matice řádu tvoří její hlavní diagonálu.[2] Jinými slovy, hlavní diagonála obsahuje prvky , kde .


Prvky pak leží na tzv. vedlejší diagonále,[2]. Vedlejší diagonála je tvořena všemi prvky , kde .


Pro prvky bezprostředně sousedící s hlavní diagonálou, se také používá termín sekundární diagonála, např. u blokových tridiagonálních matic. Horní sekundární diagonálu čtvercové matice řádu tvoří prvky a dolní sekundární diagonálu tvoří prvky .


Pokud se hovoří jen o diagonále matice, je tím obvykle myšlena hlavní diagonála.
Hodnost matice
Související informace naleznete také v článku Hodnost matice.
Hodnost matice se dá definovat jako počet lineárně nezávislých řádků (předpokládáme, že prvky matice jsou prvky nějakého tělesa). Platí, že počet lineárně nezávislých sloupců matice je stejný jako počet lineárně nezávislých řádků. Hodnost matice je též rovna dimenzi prostoru obrazů lineárního zobrazení reprezentovaného maticí .
Algebraické vlastnosti prostorů matic
Obvykle se předpokládá, že prvky matice jsou z nějakého okruhu nebo tělesa. Označme jej (obvykle nebo ). Množina všech čtvercových matic tvoří asociativní algebru, která se nazývá maticová algebra, značí se , , nebo apod. Pro je nekomutativní a její centrum je izomorfní (je tvořeno násobky jedničkové matice). Je jednoduchá, tj. nemá žádné netriviální oboustranné ideály. Navíc každá konečně rozměrná jednoduchá asociativní algebra (nad nějakým tělesem) je izomorfní maticové algebře. Každá volba báze -dimenzionálního prostoru nám dává izomorfizmus . Jediná ireducibilní reprezentace této asociativní algebry je její definující reprezentace na .









Matice je invertovatelná, právě když její determinant je nenulový (toto má smysl, i kdyby byly prvky matice z obecného komutativního okruhu, a analogické tvrzení lze zformulovat i v kvaternionových maticích).
Množina všech regulárních (tj. invertovatelných) matic tvoří grupu, která se označuje . Pro je reduktivní. Její jednoduchá podgrupa je grupa matic s jedničkovým determinantem .



Důvod dvojího značení
Matice se obvykle používají k zápisu lineárních zobrazení mezi vektorovými prostory. Předpokládejme, že matice přiřadí vektoru , který má souřadnice (v nějaké bázi) vektor, který má (v nějaké bázi cílového prostoru) souřadnice (symbolicky ).





Užíváme-li matice k operaci s vektory v Euklidovském prostoru, nebo kdykoliv se příslušný skalární součin chová stejně jako v Euklidovském prostoru a předpokládáme, že jediné změny souřadnicových systémů, které uvažujeme, jsou rotace a zrcadlení, pak není potřeba rozlišovat polohu indexů a řádkové a sloupcové vektory lze mezi sebou libovolně zaměňovat. Jakmile se však skalární součin chová jinak (např. Diracova notace v kvantové mechanice), anebo uvažujeme i jiné transformace souřadnic než rotace a zrcadlení, pak se při přechodu do jiných souřadnic typicky jinak transformují vektory jako duální vektory. Sloupce matice se chovají jako vektory, kdežto řádky matice jako duální vektory, neboli lineární formy. Ve fyzice se pak obvykle souřadnice vektorů píšou nahoru a souřadnice duálních vektorů dolů.
Tento koncept lze matematicky formalizovat, pokud řekneme, že matice je prvek prostoru zapsán v nějakých bázích prostorů . Protože ale , můžeme chápat matici jako tenzor typu (1,1) a u tenzorů se píšou kovariantní složky dolů a kontravariantní nahoru. Pak se matice bude při přechodu k novým souřadnicím v prostorech V a W transformovat „správně“.




Matice ale nereprezentují jen lineární zobrazení mezi vektorovými prostory. Do matice se taky dá zapsat bilineární forma, která dvěma vektorům přiřadí číslo. Pak to odpovídá tenzoru typu (0,2) a při přechodu do jiných souřadnic se transformuje jako tenzor typu (0,2). V tomto případě bychom prvky matice značili () (oba indexy dolů).
Pokud však matice reprezentuje něco jiného (třeba systém lineárních rovnic, na který se nemusíme dívat jako na maticovou rovnici a nepotřebujeme vědět, jak se transformuje při změně souřadnic), pak nemá smysl horní a dolní indexy rozlišovat.
Čtvercové matice
Čtvercová matice je matice se stejným počtem řádků a sloupců. Matice typu se stručně nazývají matice řádu .
- Matici, která má nenulové prvky pouze na hlavní diagonále, tzn. pro , nazýváme diagonální maticí. Prvky diagonální matice lze vyjádřit pomocí Kroneckerova symbolu , kde jsou diagonální prvky matice. Pokud pro všechny diagonální prvky diagonální matice platí , jedná se o jednotkovou matici , pro jejíž prvky platí
- Matici, která má všechny prvky pod hlavní diagonálou nulové, označujeme jako horní trojúhelníkovou matici. Taková matice má tvar








- Podobně označujeme jako dolní trojúhelníkovou matici takovou matici, která má všechny prvky nad diagonálou nulové.
- Pokud je transponovaná matice shodná s původní maticí, tzn. , pak matici označujeme jako symetrickou. Pro prvky symetrické matice platí:


- Matici označujeme jako antisymetrickou, platí-li pro všechny prvky této matice vztah:

- Matice je inverzní maticí k čtvercové matici , pokud platí
- , kde je jednotková matice (stejného typu jako ). Matice je pak také stejného řádu jako .

- Matici , ke které existuje inverzní matice, označujeme jako regulární matici. Není-li matice regulární, pak ji označujeme jako singulární.
- Adjungovaná matice k matici je transponovaná matice algebraických doplňků matice .

Determinant
Podrobnější informace naleznete v článku Determinant.
Determinant čtvercové matice , označovaný nebo , je číslo kódující určité vlastnosti matice. Matice je regulární, právě když je její determinant nenulový. Absolutní hodnota determinantu je rovna ploše (v ) případně objemu (v ) obrazu jednotkového čtverce (resp. krychle), přičemž jeho znaménko odpovídá orientaci příslušného lineárního zobrazení. Determinant je kladný, právě když je orientace zachována.



Determinant matic řádu dva je dán vztahem

Determinant matic řádu tři má 6 členů (Sarrusovo pravidlo). Leibnitzův vzorec zobecňuje tyto dva vzorce na všechny dimenze.

Determinant součinu čtvercových matic je roven součinu jejich determinantů:

Přičtení násobku libovolného řádku do jiného řádku nebo násobku libovolného sloupce do jiného sloupce nezmění determinant. Záměna dvou řádků nebo dvou sloupců změní znaménko determinantu na opačné. Pomocí těchto operací lze libovolnou matici převést na dolní (nebo na horní) trojúhelníkovou matici. Determinant těchto matice je pak součin prvků na hlavní diagonále. Uvedený postup lze použít pro výpočet determinantu jakékoli matice. Konečně, Laplaceův rozvoj vyjadřuje determinant pomocí minorů, což jsou determinanty podmatic. Toto rozšíření lze použít pro rekurentní definici determinantu (za výchozí případ vezmeme determinant matice , který je jejím jediným prvkem, nebo dokonce determinant matice , což je 1), což lze považovat za ekvivalentní Leibnizově vzorci. Determinanty mohou být použity k řešení soustav lineárních rovnic pomocí Cramerova pravidla, podle nějž jsou hodnoty neznámých rovny podílům determinantů.


Vlastní čísla a vlastní vektory
Podrobnější informace naleznete v článku Vlastní vektory a vlastní čísla.
Číslo a nenulový vektor vyhovující rovnici


jsou nazývány vlastním číslem (hodnotou) a vlastním vektorem . [pozn. 1] Číslo λ je vlastním číslem matice řádu , právě když je singulární, což je ekvivalentní podmínce


Polynom v neznámé odpovídající determinantu se nazývá charakteristický polynom matice . Jde o monický polynom stupně , a proto rovnice má nejvýše různých řešení, což jsou právě všechna vlastních čísla matice . Ta mohou být komplexní, a to i pro některé reálné matice. Podle Cayley-Hamiltonovy věty platí . Jinými slovy, dosadíme-li samotnou matici do svého vlastního charakteristického polynomu, dostaneme za výsledek nulovou matici.





Reálné a komplexní matice
| Přehled některých druhů matic | ||
| Nad | Nad | vlastnost |
| hermitovská | symetrická | |
| unitární | ortogonální | |
| regulární (invertibilní) | ||




- Pokud každý prvek komplexní matice nahradíme prvkem k němu komplexně sdruženým , pak získáme matici , kterou označujeme jako komplexně sdruženou matici. Reálné matice se shodují se svými komplexně sdruženými maticemi .
- Provedeme-li na matici transpozici a komplexní sdružení, získáme matici hermitovsky sdruženou (někdy též psáno „hermiteovsky“, podle Charlese Hermita). Hermitovsky sdruženou matici značí různí autoři různě, zpravidla některým z následujících způsobů



- (poslední z možných zápisů se může snadno plést s tzv. Mooreovou–Penroseovou pseudoinverzní maticí)

- Pokud je hermitovsky sdružená matice rovna původní matici, tzn. , říkáme, že matice je hermitovská (též samosdružená nebo samoadjungovaná). Každá hermitovská matice má všechna vlastní čísla reálná (důkaz indukcí s využitím základní věty algebry a Gram-Schmidtovy ortogonalizace).
- Symetrická reálná matice řádu se nazývá:
- pozitivně semidefinitní, pokud pro všechny vektory platí ;
- pozitivně definitní, pokud pro všechny vektory různé od platí ;
- negativně (semi)definitní, pokud v předchozích definicích použijeme obrácené nerovnosti, tj. a
- indefinitní v ostatních případech, neboli existují taková, že a zároveň .









- Uvedené vlastnosti jsou definovány i pro komplexní hermitovské matice; jen je třeba vzít v potaz všechny komplexní vektory a v součinu nahradit obyčejnou transpozici za hermitovskou transpozici .


- Matici označujeme jako unitární, jestliže inverzní matice je rovna matici hermitovsky sdružené , tzn.



Použití
Matice jako zápis lineárního zobrazení
Matice představují nejjednodušší nástroj, jak popsat v souřadnicích lineární zobrazení z prostorů V do prostoru W, pokud máme na prostoru V zvolenou bázi a na prostoru W bázi . Matice zobrazení vytvoříme tak, že její i-tý sloupec bude zápis souřadnic obrazu vektoru zapsaného v bázi .




Matice přechodu
Matice jsou užitečný nástroj na spočtení souřadnic vektoru v nějaké bázi, pokud známe jeho souřadnice v jiné bázi. Pokud a jsou dvě báze, pro které platí , neboli




pak matice se nazývá matice přechodu od báze k bázi . Pro souřadnice pak platí



kde jsou souřadnice libovolného vektoru v bázi a jsou jeho souřadnice v bázi a je inverzní matice k matici .


Duální báze k a (pokud je píšeme do sloupců) se transformují stejně jako souřadnice a souřadnice duálních vektorů v duálních bázích (pokud je píšeme do řádků) stejně jako původní bázové vektory.


Matice jako zápis bilineární formy
Matice představují jednoduchý nástroj, jak popsat v souřadnicích bilineární zobrazení (například skalární součin) (obvykle nebo ), pokud máme na prostoru zvolenou bázi a na prostoru bázi . Matice zobrazení vytvoříme tak, že , kde (.) je příslušná bilineární forma. Pak v souřadnicích platí .




Soustavy lineárních rovnic
Související informace naleznete také v článku Soustava lineárních rovnic.
Soustava rovnic o neznámých se dá zapsat elegantně v maticovém tvaru

kde

jsou matice soustavy, vektor pravých stran a vektor neznámých. Často při řešení rovnic stačí pracovat s maticí soustavy a vektorem pravých stran, které se pro potřeby výpočtu spojují do rozšířené matice soustavy (viz Gaussova eliminace).

Zkoumání lineární nezávislosti vektorů
Je-li dána množina vektorů ze stejného vektorového prostoru v souřadnicích, je možné tyto vektory (resp. jejich souřadnicové vyjádření) zapsat pod sebe jako řádky matice. Lineární obal řádků matice se nezmění, pokud budu se s maticí provádí následující úpravy:
- Výměna dvou řádků
- Vynásobení řádku nenulovým číslem
- Přičtení násobku nějakého řádku k jinému řádku
Pokud se podaří postupnou aplikací těchto úprav vytvořit v matici nulový řádek, původní vektory jsou lineárně závislé (viz též Gaussova eliminace). Pokud se podaří matici upravit do odstupňovaného tvaru aniž by vznikl nulový řádek, jsou původní vektory lineárně nezávislé. Viz též hodnost matice.
Řešení obyčejných diferenciálních rovnic
Obyčejná homogenní diferenciální rovnice s konstantními koeficienty, anebo systém rovnic s konstantními koeficienty, se dá zapsat v maticovém tvaru
kde je sloupcový vektor neznámých a je čtvercová matice. Řešení je pak vektorový prostor generovaný sloupci matice dané maticovou funkcí .



Historie
Matice byly odedávna používány pro řešení soustav lineárních rovnic, ale až do 19. století byly obvykle nazývány pole. Jedním z prvních textů využívajících koncept pole (včetně determinantů) je Devět kapitol o matematickém umění napsaný v Číně v 10.–2. století před naším letopočtem. V Evropě představil tuto metodu italský matematik Gerolamo Cardano v roce 1545 a to ve svém díle Ars Magna. [3] Japonský matematik Seki použil stejné metody pole k řešení soustavy rovnic v roce 1683. Nizozemský matematik Jan de Witt reprezentoval transformace pomocí polí ve své knize Elements of Curves z roku 1659. [3] V letech 1700 až 1710 propagoval Gottfried Wilhelm Leibniz použití polí pro záznam informací nebo řešení. Mimo jiné experimentoval s více než 50 různými systémy polí. [3] Cramerovo pravidlo bylo poprvé předvedeno v roce 1750.
Termín „matice“ (latinsky matrix - „lůno“, „zdroj“, „původ“, „seznam“, „registr“, odvozeno od mater - matky) zavedl v roce 1850 James Joseph Sylvester, který považoval matici za objekt, z něhož pochází několik determinantů, dnes nazývaných minory. To jsou determinanty menších matic, vzniklých z původní matice odstraněním sloupců a řádků. V dokumentu z roku 1851 Sylvester vysvětluje:
| „ | V předchozích článcích jsem definoval "Matrix" jako pravoúhlé pole členů, z nichž mohou vznikat různé systémy determinantů jako z lůna rodiče. | “ |
| — The Collected Mathematical Papers of James Joseph Sylvester: 1837–1853[4] | ||
V polovině 19. století publikoval Arthur Cayley pojednání o geometrických transformacích pomocí matic, které nebyly jen přeuspořádanými množinami koeficientů, jak tomu bylo dříve. Místo toho definoval operace jako sčítání, odčítání, násobení a dělení jako transformace těchto matic a ukázal, že jsou asociativní a distributivní. Cayley zkoumal a demonstroval nekomutativitu součinu matic i komutativitu součtu. [3] Do té doby se maticová teorie omezovala použití polí téměř výhradně na determinanty, a proto byly abstraktní maticové operace Arthura Cayleyho doslova revoluční, zejména proto, že Cayleyův koncept matic byl nezávislý na soustavách rovnic. V roce 1858 Cayley publikoval své A memoir on the theory of matrices [5], ve kterých představil Cayley-Hamiltonovu větu.
Anglický matematik Cuthbert Edmund Cullis byl první, kdo v roce 1913 zavedl pro matice moderní závorkovou notaci. Současně předvedl první významné použití notace k reprezentaci matice, kde odkazuje na -tý řádek a -tý sloupec. [3]

Moderní studia determinantů vycházela z několika zdrojů. Číselně-teoretické problémy přivedly Gausse ke vztahům mezi koeficienty kvadratických forem, to jsou výrazy jako , lineárními zobrazeními ve třech rozměrech a maticemi. Tyto pojmy dále rozvinul Eisenstein, včetně poznámky, že součin matic není komutativní. První obecná tvrzení o determinantech dokázal Cauchy, přičemž determinant matice definoval následovně:


V polynomu , kde označuje součin uvedených členů, nahraďte mocniny za .




V roce 1829 Cauchy ukázal, že vlastní čísla symetrických matic jsou reálná.
Jacobi se zaměřil na determinant související s funkcemi více proměnných. Tento determinant, později Sylvesterem nazvaný Jacobiho determinant, může být použit k popisu geometrických transformací na lokální (nebo i infinitezimální) úrovni. První axiomatický popis determinantů podali současně v roce 1903 Kronecker a Weierstrass ve svých článcích Vorlesungen über die Theorie der Determinanten a Zur Determinantentheorie. Do té doby byly determinanty definovány jen pomocí konkrétnějších přístupů, jako je například výše uvedený Cauchyho vzorec.
Mnohé věty se nejprve zabývaly pouze malými maticemi. Například Cayley-Hamiltonova věta byla ve zmíněné Cayleyho monografii dokázána jen pro matice a Hamilton ji pak rozšířil i na matice . Teprve Frobenius, pracující na bilineárních formách, zobecnil v roce 1898 tuto větu na všechny rozměry. Gaussova–Jordanova eliminace, zobecňující speciální případ nyní nazývaný Gaussova eliminace, byla popsána Wilhelmem Jordanem až na konci 19. století.

Matice získaly ústřední roli v lineární algebře na počátku 20. století , částečně díky jejich použití v klasifikaci hyperkomplexních číselných soustav z předchozího století.
Maticová mechanika zavedená Heisenbergem, Bornem a Jordanem vedla ke studiu matic s nekonečně mnoha řádky a sloupci. Von Neumannův pozdější matematický popis kvantové mechaniky přispěl k dalšímu rozvoji souvisejících pojmů z funkcionální analýzy, jako jsou například lineární operátory na Hilbertových prostorech. Ty, velmi zhruba řečeno, odpovídají euklidovskému prostoru, ale s nekonečnem nezávislých směrů.
Další historická použití slova „matice“ v matematice
Termín matice byl použit neobvyklým způsobem v následujících případech:
Bertrand Russell a Alfred North Whitehead použili v díle Principia Mathematica (1910–1913) slovo „matice“ v kontextu svého axiomu redukovatelnosti. Tento axiom zavedli coby prostředek k postupné redukci jakékoli funkce na funkci nižšího typu, takže "naspod" (řád 0) je funkce identická se svým rozšířením:
| „ | Zaveďme název matice pro jakoukoli funkci, bez ohledu na počet proměnných, která neobsahuje žádné zjevné proměnné. Potom se jakákoli možná funkce jiná než matice odvozuje z matice pomocí zobecnění, to znamená zvážením tvrzení, že zkoumaná funkce je pravdivá pro všechny možné hodnoty nebo s nějakou hodnotou jednoho z argumentů, druhého argumentu nebo zbývajících neznámých argumentů. | “ |
| — Principia Mathematica to *56, 1913 [6] | ||
Například funkce dvou proměnných a může být redukována na soubor funkcí jediné proměnné tím, že „uvážíme“ funkci pro všechny možné hodnoty „jednotlivých" dosazených za proměnnou . Získaný soubor funkcí jediné proměnné , tedy , pak lze redukovat na „matici“ hodnot „uvážením“ funkce pro všechny možné hodnoty „jednotlivých“ nahrazených místo proměnné :





- .

Alfred Tarski ve svém Úvodu do logiky z roku 1946 použil slovo „matice“ jako synonymum pro pravdivostní tabulku používanou v matematické logice. [7]
Další použití
V matematice a fyzice:
- Jacobiho matice
- Hessova matice
- Wronského matice
- incidenční matice grafu
Ve statistice:
- Matice dat (zcela obecná tabulka popisující závislost jedné veličiny na druhé)
- Korelační matice
- Stochastická matice
- kontingenční tabulky
V kvantové mechanice:
- Zápis operátorů do matic
- Matice hustoty (popis smíšeného stavu systému)
- Pauliho matice
V populační biologii:
- Leslieho model
Odkazy
Poznámky
- ↑ Eigen znamená „vlastní“ v němčině a nizozemštině.
Reference
V tomto článku byl použit překlad textu z článku Matrix (mathematics) na anglické Wikipedii.
- ↑ ČSN EN ISO 80000-2 (011300). Veličiny a jednotky - Část 2: Matematika. Česká agentura pro standardizaci, 2020-11-01. detail.
- ↑ a b Slovník školské matematiky. Praha: SPN, 1981. 240 s.
- ↑ a b c d e Discrete Mathematics 4th Ed. Dossey, Otto, Spense, Vanden Eynden, Published by Addison Wesley, October 10, 2001 ISBN 978-0-321-07912-1, p. 564-565
- ↑ The Collected Mathematical Papers of James Joseph Sylvester: 1837–1853, Paper 37, p. 247. Původní znění: "I have in previous papers defined a "Matrix" as a rectangular array of terms, out of which different systems of determinants may be engendered as from the womb of a common parent."
- ↑ Phil.Trans. 1858, vol.148, pp.17-37 Math. Papers II 475-496
- ↑ Whitehead, Alfred North; and Russell, Bertrand (1913) Principia Mathematica to *56, Cambridge at the University Press, Cambridge UK (republished 1962) str 162 a násl., původní znění: "Let us give the name of matrix to any function, of however many variables, that does not involve any apparent variables. Then, any possible function other than a matrix derives from a matrix by means of generalization, that is, by considering the proposition that the function in question is true with all possible values or with some value of one of the arguments, the other argument or arguments remaining undetermined."
- ↑ Tarski, Alfred; (1946) Introduction to Logic and the Methodology of Deductive Sciences, Dover Publications, Inc, New York NY, ISBN 0-486-28462-X.
Literatura
- Slovník školské matematiky. Praha: SPN, 1981. 240 s.
- BÄRTSCH, Hans-Jochen. Matematické vzorce. Praha: Academia, 2006. 832 s. ISBN 80-200-1448-9. Kapitola Matice, s. 180–198.
- BEČVÁŘ, Jindřich. Lineární algebra. 1. vyd. Praha: Matfyzpress, 2019. 436 s. ISBN 978-80-7378-392-1.
- HLADÍK, Milan. Lineární algebra (nejen) pro informatiky. 1. vyd. Praha: Matfyzpress, 2019. 328 s. ISBN 978-80-7378-378-5. S. 39.
- OLŠÁK, Petr. Lineární algebra [online]. Praha: 2007 [cit. 2023-02-20]. Dostupné online.
- MOTL, Luboš; ZAHRADNÍK, Miloš. Pěstujeme lineární algebru [online]. [cit. 2023-02-20]. Dostupné online.
Související články
- Determinant
- Hodnost matice
- Jordanův rozklad
- Kontingenční tabulka
- Lineární algebra
- LU rozklad
- Matice přechodu
- Maticová funkce
- Násobení matic
- Norma matice
- Soustava lineárních rovnic
- Stopa matice
- Transpozice matic
Externí odkazy
 Obrázky, zvuky či videa k tématu matice na Wikimedia Commons
Obrázky, zvuky či videa k tématu matice na Wikimedia Commons  Slovníkové heslo matice ve Wikislovníku
Slovníkové heslo matice ve Wikislovníku- Učebnice lineární algebry na webu (anglicky)
- Autar Kaw, Introduction to Matrix Algebra
- Maticová kalkulačka
- Operace s maticemi v R (determinant, stopa, inverzní, adjungovaná, transponovaná)*
- Sčítání a násobení matic Archivováno 24. 3. 2013 na Wayback Machine.
Portály: Matematika










